Connect with us
* Required fields

 Bay of Campeche, Mexico
Bay of Campeche, Mexico
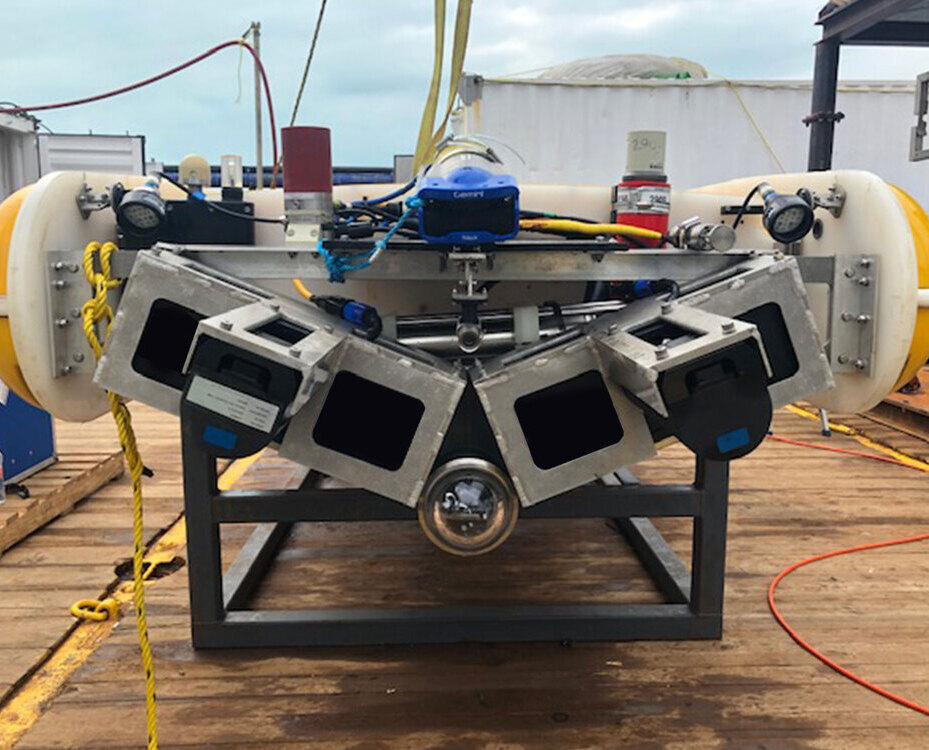
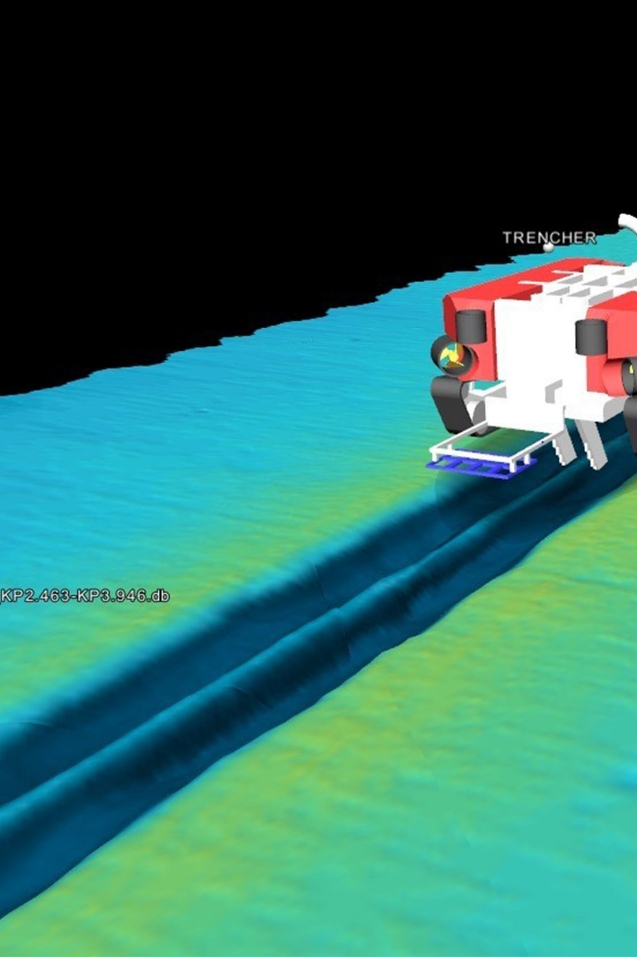
Sulmara was commissioned to deliver trenching survey data without the requirement for a survey support vessel. As part of this five-month project live “as-built” data during trenching was essential. While working in the Gulf of Mexico, Sulmara was able to improve the speed of delivery of “as-trenched” survey work, as well as reducing overall vessel time spent, by performing simultaneous trenching and survey operations.